Índices de Vegetación con Imágenes de Satélite
Vegetation Index from Satellite Imagery
El análisis de la vegetación y la detección de los cambios en los patrones de vegetación son claves para la evaluación y el monitoreo de recursos naturales. Entonces no resulta sorpresivo que la detección y la evaluación cuantitativa de la vegetación verde es una de las aplicaciones principales de la percepción remota para el manejo de recursos ambientales y la toma de decisiones (Eastman 2003).
El empleo de los cocientes para discriminar masas de vegetales se deriva del peculiar comportamiento radiométrico de la vegetación. La signatura espectral característica de la vegetación sana muestra un claro comportamiento entre las bandas roja (0.6 a 0.7 µm) y el infrarrojo cercano (0.7 a 1.1 µm). Se produce un notable contraste espectral entre la banda R del espectro y la del IRC, lo que permite separar la vegetación sana de otras cubiertas (Chuvieco 2008).


Figura1: Contraste espectral de la vegetación sana entre las bandas R e IRC del espectro
Cuando la vegetación sufre algún tipo de estrés, su reflectividad será inferior en el IRC, aumentando paralelamente en el rojo (al tener menor absorción clorofílica), con lo que el contraste en ambas capas será mucho menor. Los índices mas empleados son el cociente simple entre las bandas (Ci), y el denominado índice de vegetación de diferencia normalizada (NDVI) propuesto originalmente por Rouse et al (1974).
Índices de vegetación
Cociente simple (Ci)
Cociente simple (Ci)
El cociente simple (Ci) representa la relación entre las reflectividades del infrarrojo cercano y del rojo, los cuales representan las reflectividades de la banda 4 y 3 respectivamente, para el TM y ETM+ de las imágenes Landsat.



Índice de vegetación de diferencia normalizada (NDVI)
El Índice de Diferencia de Vegetación Normalizado, también conocido como Normalized Difference Vegetation Index (NDVI) (Rouse et al., 1974) por sus siglas en inglés. Es un índice usado para medir la diferencia normalizada entre las reflectancias del rojo y del infrarrojo cercano, proporcionando una medida sobre la cantidad, calidad y desarrollo de la cobertura vegetal y vigorosidad en áreas extensas.


Guyot y Gu, citados por Chuvieco (2008) usando un modelo teórico concluyen que los valores del NDVI para imágenes Landsat y SPOT calculados a partir de los ND subestiman entre 0.05 y 0.20 el valor calculado con reflectividades, siendo este error mayor con valores de NDVI inferiores a 0.5 y para las imágenes SPOT. En consecuencia, proponen una corrección que haga equivalente el cálculo con ND o reflectividades para las imágenes Landsat:


Índice de vegetación transformado (TVI)
Dering y colaboradores citados por Eastman (2003), modifica el NDVI agregando una constante de 0.5 a todos sus valores y calculando la raíz cuadrada de los resultados. La constante 0.5 se introduce para evitar operar con valores negativos del NDVI. El cálculo de la raíz cuadrada se emplea para corregir los valores del NDVI que se aproximan a una distribución Poison e introducir una distribución normal. Con estos dos elementos, el TVI toma la siguiente forma:


Índice de vegetación transformado corregido (CTVI)
Propuesto por Perry y Lautenschlager citados por Eastman (2003), apunta a corregir el TVI. Resulta obvio que agregar una constante de 0.5 a todos los valores del NDVI no siempre elimina los valores negativos porque los valores del NDVI pueden tener el rango -1 a +1. Los valores menores que -0.5 dejan pequeños valores negativos luego de la operación de adición. Entonces, el CTVI se realiza para resolver esta situación al dividir (NDVI + 0,50) por su valor absoluto y multiplicar el resultado por la raíz cuadrada del valor absoluto. Esto suprime el NDVI negativo. La ecuación se escribe:


Índice de vegetación transformado de Thian (TTVI)
Thiam, citado por Eastman (2003) indica que la imagen resultante del CTVI puede ser muy “ruidosa” debido a una sobrestimación de la cualidad verde. Él sugiere ignorar el primer término de la ecuación CTVI para obtener mejores resultados. Esto se logra simplemente sacando la raíz cuadrada de los valores absolutos del NDVI en la expresión original del TVI para tener un nuevo índice de vegetación llamado Índice de Vegetación Transformado de Thiam (TTVI).


Índice de vegetación de cociente (RVI)
Fue sugerido por Richardson y Wiegand, citados por Eastman (2003) por tener gráficamente la misma fuerzas y debilidades que el TVI (ver arriba) mientras que resulta más simple a nivel computacional. El RVI es claramente el inverso del cociente simple estándar (RATIO) como se muestra en esta expresión:


Índice de vegetación cociente normalizado (NRVI)
Es una modificación del RVI por Baret y Guyot (1991) por el cual el resultado del RVI - 1 es normalizado sobre el RVI + 1.


Índice de vegetación ajustado al suelo (SAVI)
Entre los factores que modifican notablemente el comportamiento del NDVI figura la proporción de vegetación/suelo observada por el sensor. Los mismos valores de NDVI pueden corresponder a cubiertas vigorosas pero poco densas, o a cubiertas densas con poca vitalidad. Para incluir explícitamente el factor suelo, clave cuando se trabaja en zonas áridas, Huete y colaboradores propusieron incluir en la formula del NDVI un parámetro (L), que ajuste el índice a una reflectividad promedio de fondo (Huete, citado por Chuvieco 2008).


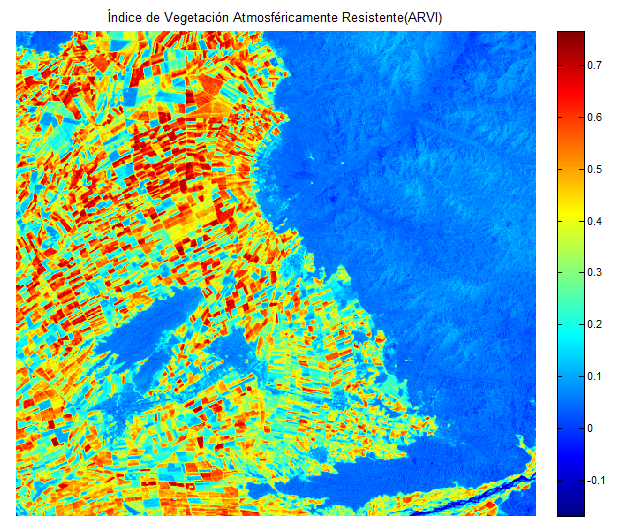
Índice de vegetación atmosféricamente resistente (ARVI)
Kaufman y Tanré, citados por Chuvieco (2008) proponen un ajuste del NDVI a las condiciones atmosféricas, teniendo en cuenta la diferente dispersión de los canales azul y rojo del espectro. De esta forma se define el ARVI de la siguiente manera:

Donde σ*IRC indica la reflectividad aparente en el infrarrojo cercano y un factor que considera la diferencia de reflectividad entre el azul y el rojo, y se define como:

Donde σ*R e indica las reflectividades aparentes en el azul y rojo, respectivamente, y ϒ es un parámetro de calibración, que depende del tipo de atmósfera, aunque para la mayor parte de los casos es igual a 1.
Índice global de monitoreo ambiental (GEMI)
Pinty y Verstraete, citados por Chuvieco (2008) proponen un índice para reducir simultáneamente el efecto atmosférico y de cambios en el color del suelo.


Índice de vegetación mejorado (EVI)
Huete, citado por Chuvieco (2008) define el índice de vegetación mejorado como una alternativa más solida a los índices tradicionales, por ser más robusto frente a la aportación del suelo y de las influencias atmosféricas. El EVI se define como:

Donde L es la corrección al efecto del fondo del follaje y C1 y C2 son coeficientes para la corrección del efecto del aerosol en las bandas rojo y azul.

Índice de infrarrojo de diferencia normalizada (NDII)
Hunt y Rock, citados por Chuvieco (2008), proponen el NDII cuando se pretenda analizar el contenido de agua en la vegetación. Al aumentar el contenido de agua en el suelo o la vegetación, disminuye paralelamente la reflectividad en el SWIR.


Índice de área foliar (LAI)
Esta definido por la razón entre el área foliar de toda la vegetación por unidad de área utilizada por la vegetación. El LAI es un indicador de la biomasa de cada pixel de la imagen (SEBAL 2002).


Referencias:
1. Chuvieco Salinero, E. 2008. Teledetección Ambiental. 2 ed. Barcelona, ES, Ariel. 592 p.
2. Eastman, R. 2003. IDRISI Kilimanjaro-Guía para SIG y Procesamiento de Imágenes. Clark Labs. 312 p.
3. Guo, J; Mason, P. 2009. Essential Image Processing and GIS for Remote Sensing. Oxford, UK. Wiley-Blackwell.462 p.
4. Rouse, J; Haas, R; Schell, J; Deering, D; Harlan, J. (1974). Monitoring the vernal advancement and retrogradation (Greenwave effect) of natural vegetation. Greenbelt. Maryland, US. NASA/GSFC. 87 p.
5. SEBAL (Surface Energy Balance Algorithms for Land, US). 2002. Advanced Training and Users Manual. 97 p.
6. Schowengerdt, R. 2007. Remote Sensing-Models and Methods for Image Processing. 3 ed. California, US, Academic Press. 558 p.
7. Steven M. de Jong; Freek D. Van der Meer. 2004. Remote Sensing Image Analysis. California, US, Springer. 370 p.
Aplicación en MATLAB:
Aplicación en MATLAB:










{kind=link}
{kind=link}
{kind=link}